15814652829
15814652829
 15814652829
15814652829
技术参数
|
型号系列
(model) |
减速比
(i) |
输入2000r/min时
额定转矩 (N.m) |
起动、停止时
容许最大转矩 (N.m) |
平均负载转矩
容许最大值 (N.m) |
瞬间
容许最大转矩 (N.m) |
最高
输入转速 (r/min) |
平均
输入转速 (r/min) |
背隙
(Arc sec) |
传动误差
(Arc sec) |
设计寿命
(Hour) |
|
MY-CSD-14-50-Ⅰ |
50
|
3.1
|
11.4
|
4.6
|
23
|
8000
|
3500
|
20
|
90
|
9000
|
|
MY-CSD-14-80-Ⅰ |
80
|
5.1
|
15
|
6.2
|
29
|
20
|
90
|
10000
|
||
|
MY-CSD-14-100-Ⅰ |
100
|
5.1
|
18
|
7.3
|
33
|
20
|
90
|
10000
|
命名规则
|
MY
|
-
|
HS
|
-
|
17
|
-
|
50
|
-
|
Ⅱ
|
-
|
SP
|
|
公司代码
|
机型名称
|
谐波齿轮节圆
直径代号 |
减速比
|
|
型式(标准)
|
非标代号
|
||||
|
蚂蚁电机品牌
|
柔轮形状:H代表中空柔轮,C代表杯型柔轮
柔轮长度:S代表标准柔轮,D代表短筒柔轮 |
14=35.6
17=43.2 20=50.8 25=63.5 32=81.3 |
30=1:30 |
|
空白=标准品
SP=形状、性能等 特殊规格 |
产品介绍
谐波传动是由美国发明家C.walt Musser 马瑟于上世纪50年代发明创造的,此谐波驱动理论应用金属的挠性和弹性力学,颠覆了传统的动力传达方式,跃然赢得举世瞩目。
|
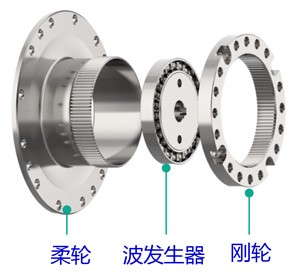
谐波传动装置构成
谐波减速传动装置主要由三个基本零部件构成,即:波发生器、柔轮和刚轮。
波发生器:由柔性轴承和椭圆凸轮组成
柔轮:带外齿圈的薄壁金属弹性体部件
刚轮:带有内齿圈的刚性圆环状部件,一般比柔轮齿数多2齿 |
|
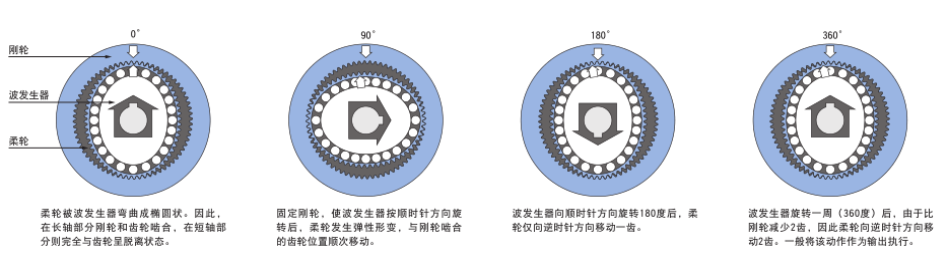
谐波齿轮传动减速原理
谐波传动是一种靠波发生器使柔轮齿轮产生可控弹性变形实现运动和动力传递的传动。波发生器内的椭圆形凸轮在柔轮内旋转使柔轮产生变形。
当波发生器装入柔轮内圆时,迫使柔轮产生弹性变形而呈椭圆状,使其长轴处柔轮轮齿插入刚轮的轮齿槽内,成为完全啮合状态;而其短轴处两轮轮轮齿完全不接触,处于脱开状态。由啮合到脱开的过程之间则处于啮出或啮入状态;当波发生器连续转动时,迫使柔轮不断产生变形,使两轮轮齿在进行啮入、啮合、啮出、脱开过程中不断改变各自的工作状态,产生了所谓的错齿运动,从而实现了主动波发生器与柔轮的运动传递。
结构创新技术
独特齿形:采用黄金分割率的双圆弧齿形设计理念,完美设计齿形的长高比,此外,通过扩大齿根R,降低了齿根应力集中,极大提高了强度、刚性及柔轮的使用寿命。
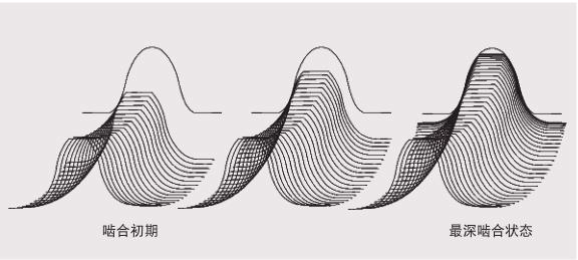
传动精度高:采用特殊的凸轮轮廓设计,使轮齿啮合重合度更高,传动更加顺畅,能真正意义上实现零齿隙,从而提高传动平稳性。
|
齿轮接触将从啮合初期开始将持续进行。通过齿轮的连续接触,同时啮合的齿数将达到总齿数的约30% 。 |
|
工艺创新技术
独特表面处理工艺:已申请国家级发明专利。重复定位精度和传动误差保持能力提高100%,接触疲劳寿命提高100%,摩擦系数由Ra 0.5降到Ra 0.1,有效降低噪音约20%;同时,提高了传动平稳性。
独特热处理工艺:采用高纯度进口材料,独特的热处理工艺,晶粒度≥9级,弹性极限提高20%,弯度疲劳强度提高15%。
|
(一)同行产品齿面接触痕 |
(二)蚂蚁电机产品齿面接触痕 |
精度保持能力提高200%,接触疲劳寿命提高200%,如图所示:同等条件下,蚂蚁电机齿面磨损情况明显优于同行产品。 |

 网站首页
网站首页
 拨打电话
拨打电话
 联系我们
联系我们